Show Me What You Can Do: Capability Calibration on Reachable Workspace for Human-Robot Collaboration
Xiaofeng Gao1, Luyao Yuan1, Tianmin Shu2 Hongjing Lu3 and Song-Chun Zhu4
Center for Vision, Cognition, Learning, and Autonomy, UCLA1
Massachusetts Institute of Technology2
UCLA Department of Psychology3
Beijing Institute for General Artificial Intelligence (BIGAI)4
Abstract
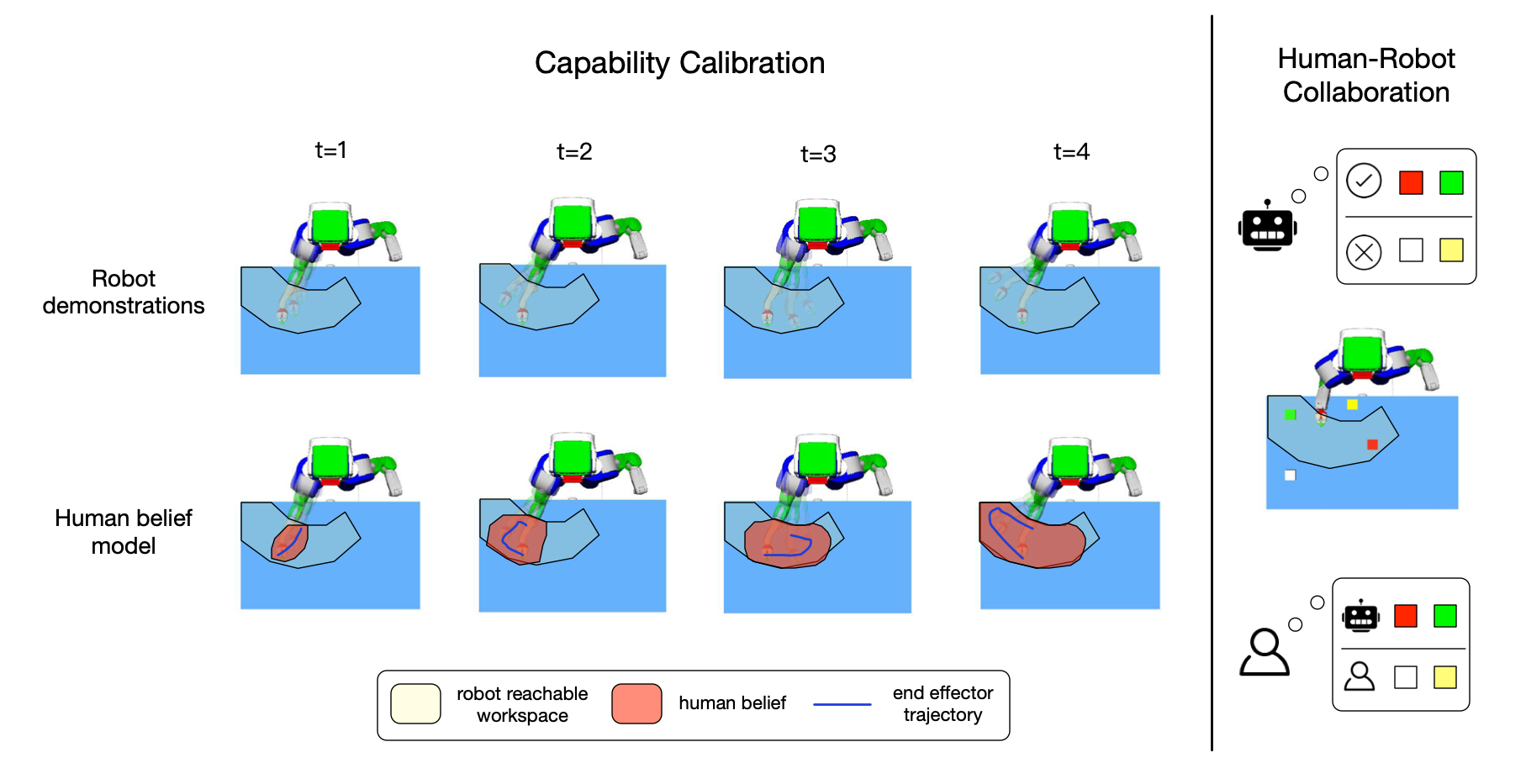
Aligning humans' assessment of what a robot can do with its true capability is crucial for establishing a common ground between human and robot partners when they collaborate on a joint task. In this work, we propose an approach to calibrate humans' estimate of a robot's reachable workspace through a small number of demonstrations before collaboration. We develop a novel motion planning method, REMP (Reachability-Expressive Motion Planning), which jointly optimizes the physical cost and the expressiveness of robot motion to reveal the robot's motion capability to a human observer. Our experiments with human participants demonstrate that a short calibration using REMP can effectively bridge the gap between what a non-expert user thinks a robot can reach and the ground-truth. We show that this calibration procedure not only results in better user perception, but also promotes more efficient human-robot collaborations in a subsequent joint task.
Paper and Demo
Paper [Link]
Gao, X., Yuan, L., Shu, T., Lu, H., & Zhu, S. C. (2022). Show Me What You Can Do: Capability Calibration on Reachable Workspace for Human-Robot Collaboration. IEEE Robotics and Automation Letters, 7(2), 2644-2651.
@article{gao2022show,
title={Show Me What You Can Do: Capability Calibration on Reachable Workspace for Human-Robot Collaboration},
author={Gao, Xiaofeng and Yuan, Luyao and Shu, Tianmin and Lu, Hongjing and Zhu, Song-Chun},
journal={IEEE Robotics and Automation Letters},
volume={7},
number={2},
pages={2644--2651},
year={2022},
publisher={IEEE}
}